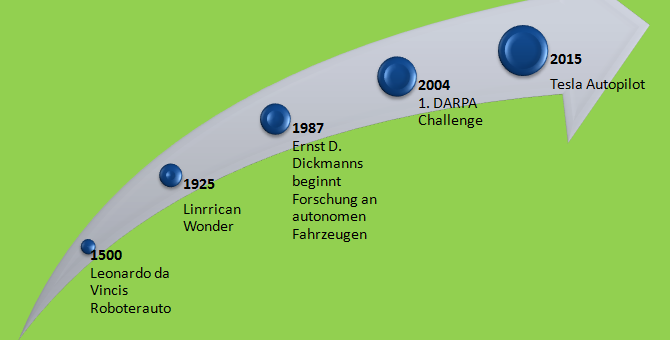
Auch wenn völlig autonome Fahrzeuge noch eine Vision der Zukunft sind, haben Menschen bereits seit Hunderten von Jahren an dieser Idee gearbeitet. Von Leonardo da Vincis ersten Versuchen bis hin zu Googles selbstfahrenden Autos – diese Übersicht zeigt wichtige Meilensteine aus der Geschichte der autonomen Fahrzeuge.
Es ist nicht genau bekannt, wann Menschen sich zum ersten Mal ein selbstfahrendes Gefährt ausmalten. Nach einigen Überlieferungen wurde der erste fliegende Teppich angeblich bereits um 130 v. Chr. gesichtet. Doch es ist gut möglich, dass es auch schon davor ähnliche Vorstellungen von futuristischen Fortbewegungsmitteln gab.
Fest steht aber, dass die Vision eines Transportmittels, das sich „wie von Zauberhand“ bewegt, wahrscheinlich beinah so alt ist wie die Menschheit selbst. In diesem historischen Überblick findet ihr deshalb einige der wichtigsten (bekannten) Meilensteine aus der Geschichte der autonomen Fahrzeuge, die die Entwicklungen von heute erst möglich gemacht haben.
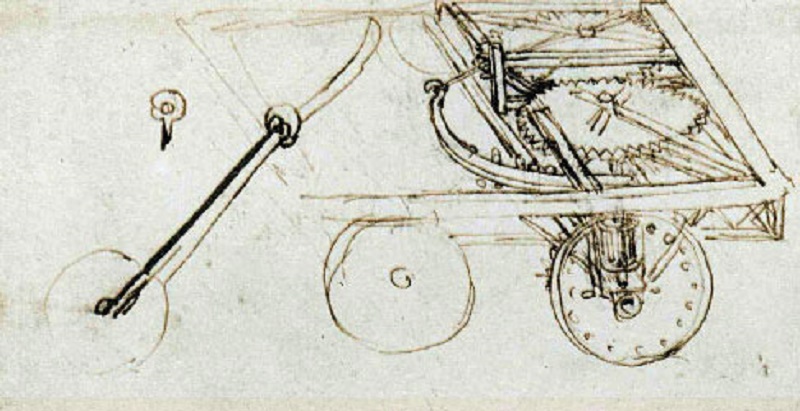
1500: Leonardo da Vinci und der selbstfahrende Wagen
Eins der ersten überlieferten Modelle eines selbstfahrenden Fahrzeugs stammt von Leonardo da Vinci. Der italienische Maler, Architekt und Erfinder zeichnete mehrere Skizzen für den Bau eines selbstfahrenden Wagens.
1866: Der erste Torpedo mit Selbstantrieb
Robert Whitehead war ein englischer Inginieur, der um das Jahr 1850 herum von der österreichisch-ungarischen Marine gebeten wurde, einen selbstfahrenden Unterwassertorpedo zu entwickeln. Gemeinsam mit seinem Partner Giovanni Luppis stellte Whitehead 1866 das Modell „Minenschiff“ vor. „Minenschiff“ wurde durch komprimierte Luft angetrieben und konnte sich mit einer Geschwindigkeit von sieben Knoten (13 km/h) bewegen und Ziele in einer Entfernung von bis zu 640 Meter treffen.
1925: Linrrican Wonder
„Linrrican Wonder“ gilt als einer der ersten Versuche mit einem selbstfahrenden Auto. Das Modell wurde 1925 von einer Firma für Funkzubehör, Houdina Radio Control, hergestellt. Das Wunderauto fuhr durch einen Stau in New York City, einzig von einer Antenne gesteuert. Genau genommen, von einem Auto, das hinter Linrrican Wonder fuhr und per Antenne Signale an den Elektromotor sandte.
1933: Der Autopilot „Mechanical Mike“
„Mechanical Mike“ ist der Name des ersten Prototypen eines Autopiloten für den Luftfahrbetrieb. Er wurde von der Sperry Gyroscope Company in den USA entwickelt und Wiley Post nutzte den Autopiloten im Jahr 1933 zum ersten Mal auf einem Flug um die Welt. „Mechanical Mike“ half Post dabei, gleichzeitig zu fliegen und zu navigieren.
1939: Futurama
Auf der Weltausstellung im Jahr 1939 präsentierte Norman Bel Geddes ein futuristisches Automodell, Futurama. Gesponsort von General Motors sollte die Installation zeigen, wie ein Auto in 20 Jahren, also im Jahr 1959, aussehen könnte. Das Modell zeigte funkgesteuerte Autos, die durch elektromagnetische Felder bewegt wurden.
1945: Teetor Cruise Control
Ralph Teetor war ein (blinder) Ingenieur aus dem US-Bundestaat Indiana. Da Teetor nicht selbst fahren konnte, wurde er von anderen in Autos mitgenommen. So wurde er eines Tages von seinem Anwalt gefahren. Dieser konzentrierte sich dabei weniger auf den Verkehr und mehr auf das Gespräch mit Teetor. Das Ergebnis war eine Fahrt, in der der Anwalt die Geschwindigkeit unkontrolliert beschleunigte, nur um wieder scharf zu bremsen. Diese holprige Fahrt hinterließ einen bleibenden Eindruck bei Teetor: 1945 erhielt er sein erstes Patent für ein Tempomat. Eine Technologie, die später den Namen „Cruise Control“ erhielt und in seiner heutigen Form zu den Fahrassistenzsystemen gehört. Das erste Auto, in dem Teetors Tempomat installiert wurde, war der Chrysler Imperial von 1958.
1953-1960: Die elektronische Fahrbahn
Ende der 50er Jahren arbeiteten Wissenschaflter an verschiedenen Konzepten von autonomen Fahrzeugen. Schwerpunkt war dabei weniger das Auto selbst, sondern vielmehr die Straße. Von 1953 bis 1958 arbeitete das US-Unternehmen RCA Labs an dieser Idee. Im Jahr 1960 veröffentlichte RCA das Konzept der elektronischen Autobahn.
1960: Ohio State University
1960 begann die Ohio State University ihre Forschung an autonomen Fahrzeugen. Die ersten Modelle der Universitätsforscher, wie der Plymouth, folgten dazu einem in der Fahrbahn eingebautem Draht. Der Plymouth war mit Sensoren ausgestattet, die den Strom im Draht aufnehmen und folgen konnten.
1961: Stanford Cart
Der „Stanford Cart“ ist ein Produkt aus den Entwicklungen in der US-Raumfahrt aus den 1960ern. So wurde der „Stanford Cart“ 1961 von einem Absolventen der Stanford University eigentlich als Fahrzeug für Mondlandungen entwickelt. Das unbemannte Fahrzeug wurde dabei von der Erde aus ferngesteuert und konnte anhand einer weißen Linie auf dem Boden autonom fahren. Später wurde das Modell auch auf der Erde als autonomes Fahrzeug getestet und nutzte Kameras zur Orientierung.
1960er: Der Citroën DS
Dieses „Hands-Off-System“ im Automodell Citroën DS wurde in den 1960er Jahren im Transport Research Laboratory in Großbritannien getestet. Es nutzte dafür, ähnlich wie die ersten autonomen Modelle in den USA, magnetische Sensoren, um unterirdischen Kabeln in der Straße alleine folgen zu können.
1977: Tsukuba Mechanical Engineering
Ein weiterer Meilenstein auf dem Weg zum autonomen Auto wie wir es heute kennen, war die Entwicklung von Tsukubas Mechanical Engineering Laboratory in Japan. Im Jahr 1977 stellten S. Tsugawa und seine Kollegen das Modell vor. Zur Wagenführung nutzte das Auto zwei Kameras, die durch analoge Computertechnologie die Bilder der Straße in Echtzeit auswerten konnte. Es erreichte eine Höchstgeschwindigkeit von 30 km/h.
1987-1994: Der deutsche Pionier Ernst Dieter Dickmanns
Ernst Dieter Dickmanns ist ein deutscher Robotiker, der von 1975 bis 2001 an der Universität der Bundeswehr München unterrichtete. Er gilt als Pionier im Bereich der autonomen Fahrzeuge.
1987: Projekt VaMoRs
Dickmanns startete seine Arbeit an autonomen Fahrzeugen mit einem Kleintransporter von Mercedes Benz, ausgerüstet mit Sensoren und Kameras. Dieses erste Projekt hieß „VaMoRs“ (Versuchsfahrzeug für autonome Mobilität und Rechnersehen). Dieses Roboterfahrzeug konnte völlig selbstständig fahren und eine Geschwindigkeit von bis zu 96 km/h erreichen.
1987: Prometheus
Im gleichen Jahr startete die Forschungsförderungsorganisation EUREKA das Projekt „Prometheus“, PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety. Auch Dickmanns und sein Team nahmen an dem siebenjährigen Projekt Teil. Seine autonomen Fahrzeuge lernten dabei, sich im öffentlichen Straßenverkehr an die unterschiedlichsten Situationen anzupassen. Ein menschlicher Fahrer saß noch zur Sicherheit im Auto. Um die hohe Menge an Daten zu verarbeiten wurden Transputer benutzt.

1994: VaMP und VITA-2
Die Abschlussvorführung des Prometheus-Programms fand 1994 bei Paris statt. Dickmanns präsentierte hier die beiden Fahrzeuge VITA-2 und VaMP von Daimler-Benz. Diese fuhren auf einer dreispurigen Autobahn über 1000 Kilometer bei Geschwindigkeiten bis zu 130 km/h. Die Modelle zeigten dabei das Fahren auf freien Spuren, das Fahren im Konvoi, Spurwechsel sowie automatisches Überholen.
1998: ARGO
Der italienische Professor Alberto Broggi der Universität von Parma initiierte 1996 das Projekt „ARGO“. Mit einem modifizierten „Lancia Thema“ Modell sollte das Auto selbstständig einem normalen Straßenverlauf folgen können. Projektabschluss war eine rund 2000 Kilometer lange Fahrt auf Autobahnen in Norditalien. Das autonome Auto legte dabei 94 Prozent der Strecke im vollautomatischen Modus zurück. Als Technologie wurden zwei Videokameras und Algorithmen zur stereoskopischen Sicht genutzt.
2004: Erste DARPA Challenge
Die legendären DARPA (Defense Advanced Research Projects Agency) Challenges waren ein wichtiger Schritt zur Entwicklung und zum Testen von autonomen Fahrzeugen. Der erste Wettbewerb fand 2004 statt. Die Herausforderung an die Ingenieurteams war, ein autonomes Fahrzeug 150 Meilen (ca. 80 Kilometer) durch die Mojave-Wüste in Kalifornien zu schicken. Den Gewinnern versprach DARPA ein Preisgeld von einer Million US-Dollar.
Kein Team konnte die Challenge erfolgreich absolvieren. Das Auto des erfolgreichsten Teams (ein Humvee namens „Sandstorm“) legte gerade einmal sieben Meilen (ca. 11 Kilometer) zurück.
Eine weitere Grand Challenges folgte 2005. Danach kam DARPA 2007 mit einer Urban Challenge heraus, 2012 gab es eine Robotics Challenge und 2013 fand die FANG Challenge (Fast Adaptable Next-Generation Ground Vehicle) statt. All diese Challenges konnten erfolgreich gemeistert werden.
DARPA hat im März 2016 eine neue Challenge angekündigt, die Spectrum Collaboration Challenge. Diese soll in mehreren Phasen von 2017 bis 2020 erfolgen.
2010 bis heute: Das Rennen um die autonomen Fahrzeuge beginnt
Ab 2010 beginnen die meisten Auto- und Technologiekonzerne die Entwicklung von fahrerlosen Autos. Als herausragender Meilensteine seien vor allem diese zwei zu nennen:
- Am 1. Mai 2012 absolviert ein autonomes Fahrzeug von Google erfolgreich einen Test durch die Stadt Las Vegas.
- 2015 führt Tesla das „Model S“ ein, ein Auto mit semiautonomen Autopiloten.
Mit diesen Entwicklungen beginnt das große Rennen um die Entwicklung eines vollständig autonomen Fahrzeugs.
Zum Weiterlesen
Wer sich für weiterführende Informationen zum Thema interessiert, kann hier einen detaillierten Artikel zu Ernst Dickmanns Pionierarbeit lesen. Eine schöne bebilderte Zusammenfassung zur „Geschichte des Automatischen Fahrens“, hat die Universität der Bundeswehr München zusammengestellt. Wer sich wiederum für eine sehr ausführliche Darstellung der Ideengeschichte hinter den automatisierten Modellen interessiert, findet diese in einer Zusammenstellung des Computer History Museums.
Auch interessant: Diese Unternehmen bauen fahrerlose Autos